Améliorer la chirurgie des cordes vocales grâce à la microrobotique
Des chercheurs de l’institut FEMTO-ST développent un nouveau système pour faciliter la découpe au laser de kystes présents sur les cordes vocales. Le microrobot qu’ils ont conçu à ces fins leur a valu de remporter le prix spécial du jury du salon Micronora.
La formation de kystes sur les cordes vocales est une pathologie courante chez les personnes qui sollicitent beaucoup leur voix (chanteurs, enseignants,…). On utilise d’ores et déjà la chirurgie laser pour enlever ces kystes, mais l’opération est délicate et les techniques actuelles présentent des inconvénients notables, à commencer par la position du patient qui induit des traumatismes du cou après l’opération. Il faut en effet maintenir la tête excessivement inclinée vers l’arrière pour que le laser, qui ne se déplace qu’en ligne droite à travers le larynx, puisse atteindre les cordes vocales. Le chirurgien opère avec du matériel encombrant, incluant un microscope, un système de contrôle avec une pédale d’actionnement et une source laser. Cette dernière se situe à environ 40 centimètres de sa cible, une distance à laquelle la moindre petite erreur de trajectoire est amplifiée.
Un défi microtechnique
L’objectif du projet européen µRALP1 est de mettre au point un nouveau dispositif pour faciliter cette chirurgie. L’institut FEMTO-ST y participe aux côtés de l’Institut italien de technologie2, de l’université de Hanovre3 et des hôpitaux de Besançon et de Gênes. Les chercheurs ont eu l’idée d’utiliser un endoscope4 flexible qui permette à la fois de visualiser les cordes vocales et d’amener la source laser à l’intérieur du patient, à 20 mm de sa cible, pour plus de précision et d’ergonomie. Cependant, l’extrémité d’un tel endoscope ne mesure que 20 mm de diamètre et y insérer les nombreux éléments indispensables à l’opération représente un véritable défi microtechnique. Il faut notamment des éclairages en lumière froide, deux caméras miniatures permettant de renvoyer une image couleur en temps réel, un laser chirurgical doublé d’un laser visible qui fait office de pointeur pour le chirurgien, et enfin le robot qui va guider ces lasers.
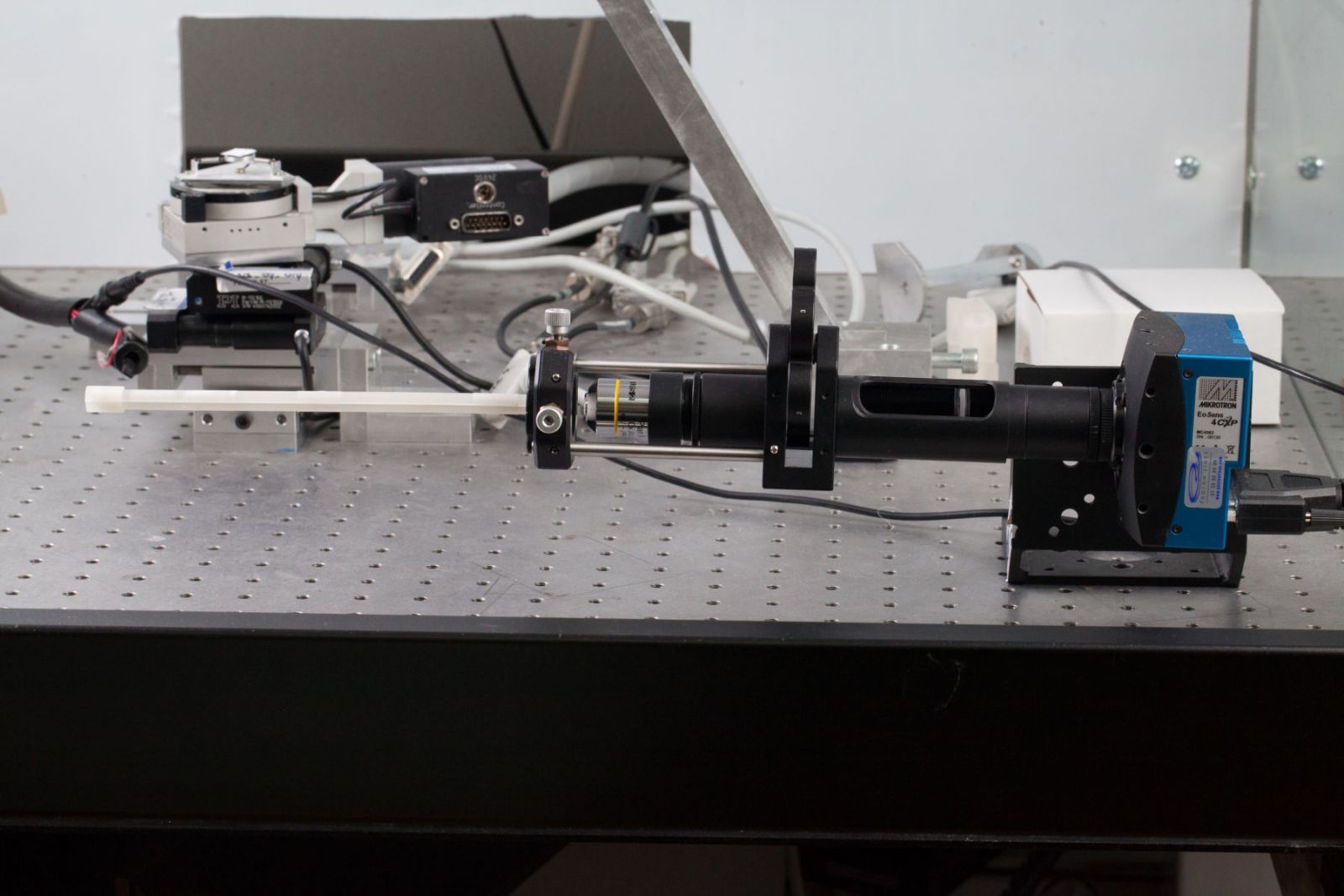
Comme les cordes vocales sont des tissus sensibles et visqueux qui cicatrisent mal, la découpe s’effectue en plusieurs passages successifs et rapides du laser. Ce dernier a une fréquence de 200 Hz, bien au-delà de ce que l’œil humain et les caméras classiques sont capables de visualiser. Pour contrôler ses mouvements, il faut donc utiliser une caméra ultrarapide dont il n’existe pas de modèle miniaturisé dans le commerce. Les chercheurs ont résolu ce problème en faisant passer l'image par un faisceau de fibres optiques inséré dans l’endoscope, ce qui permet de laisser cette caméra à l’extérieur du patient.
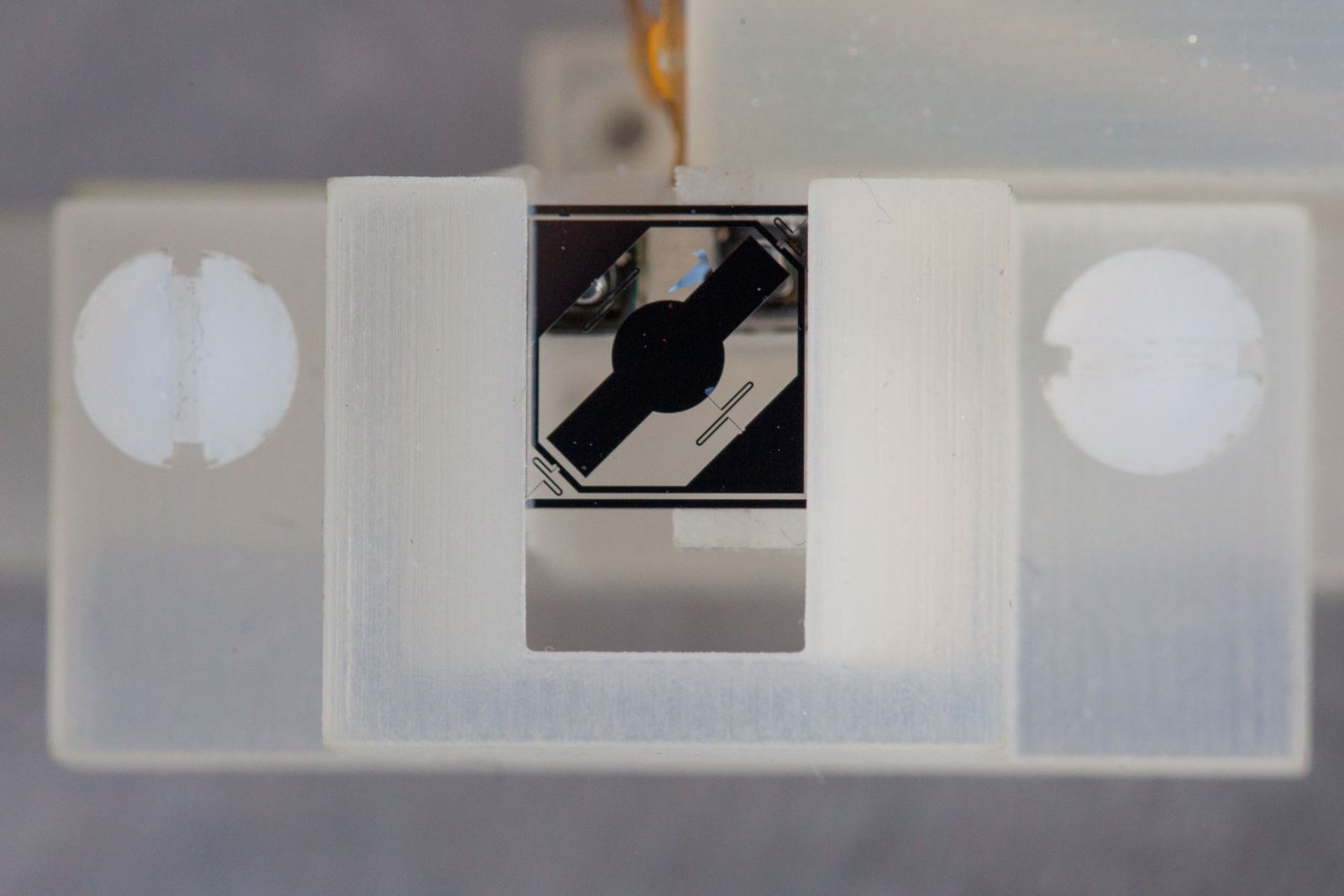
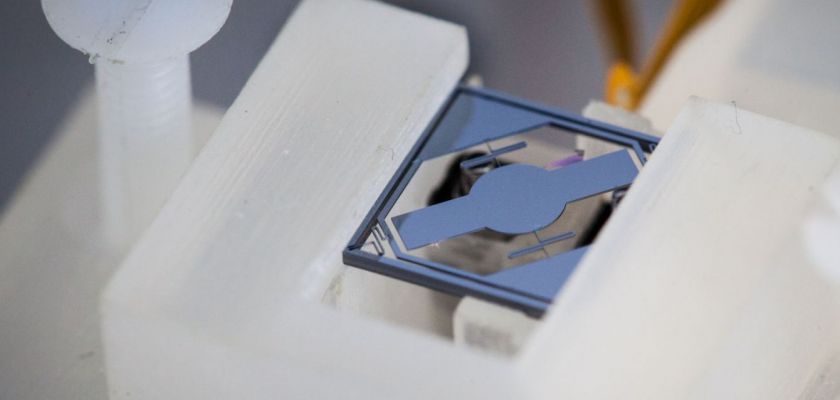
Reste un espace de seulement 8mmx8mmx12mm pour le système robotisé de guidage du laser. Trois élèves de BTS Conception industrialisation microtechnique du lycée Edgar Faure à Morteau ont été impliqués dans cette phase de conception. Ils ont élaboré un modèle en résine permettant de tester la mécanique du robot envisagé. Les chercheurs du département AS2M5 de l’institut FEMTO-ST ont travaillé en parallèle sur trois modèles différents. Le plus abouti à l’heure actuelle fait appel à deux micromoteurs piézoélectriques6 qui permettent de faire basculer un miroir mobile selon deux axes pour diriger le laser. Ce microrobot a été fabriqué sur du sillicium grâce à la plate-forme technologique MIMENTO7
Une grande précision
Un algorithme mis au point au laboratoire permet de contrôler la trajectoire de ce laser grâce aux images renvoyées par la caméra ultrarapide et de la rectifier. Le chirurgien définit le tracé de la découpe sur une tablette8 et, grâce au système de guidage et à l’automatisation9, obtient une précision de l’ordre d’une centaine de microns.
Les kystes en question sont parfois des cancers à des stades précoces. Dans ce cas, l’opération doit à tout prix éviter de laisser en place des cellules malades. C’est là qu’interviennent des membres du département d’optique de l’institut FEMTO-ST, qui ont ajouté au système des éclairages et des filtres permettant de visualiser la zone cancéreuse grâce à une technique de fluorescence10.
Ce microrobot et son système de guidage ont été récompensés par le prix spécial du jury le 23 septembre lors du salon international des microtechniques Micronora, à Besançon.
L’ensemble de ce dispositif apportera une véritable valeur ajoutée à la phonochirurgie et pourra probablement être décliné pour d’autres types d’opérations. L’étude va se poursuivre avec différentes phases d’essais. Les chercheurs envisagent ensuite la création d’une start-up en vue de l’industrialisation et de la mise sur le marché, d’ici quelques années.
- Prononcer microRALP
- Istituto italiano di tecnologia (IIT)
- Leibniz Universität Hannover (LUH)
- Un endoscope est un instrument médical en forme de tube, faisant souvent appel à des fibres optiques, qui permet de visualiser l’intérieur du patient en passant par les voies naturelles ou par de petites incisions.
- Automatique et systèmes micro-mécatroniques
- Les matériaux piézoélectriques transforment l’énergie électrique en énergie mécanique et réciproquement. Ils se polarisent électriquement sous l’effet d’une contrainte mécanique et sont capables de se déformer quand on leur applique un champ électrique.
- Centrale de technologie « Microfabrication pour la mécanique, les nanosciences, la thermique et l'optique ».
- Les chercheurs italiens se chargent de la partie « interface homme-machine », tandis que les allemands conçoivent l’endoscope et son système de traction.
- Les systèmes actuels de guidage du laser ne sont que semi-automatiques.
- Les cellules cancéreuses se caractérisent par la présence d’une protéine spécifique. Celle-ci réagit quand elle est stimulée par la lumière, à une certaine longueur d’onde, en émettant elle-même de la lumière à une autre longueur d’onde. Avec des éclairages et des filtres adéquats, on peut visualiser les zones où cette protéine est présente en quantité.
Contact
Nicolas Andreff
nicolas.andreff@femto-st.fr
Kanty Rabenorosoa
kanty.rabenorosoa@femto-st.fr
Sergio Lescano
sergio.lescano@femto-st.fr
Brahim Tamadazte
brahim.tamadazte@femto-st.fr
Projet µRALP
http://www.microralp.eu